 国际站
国际站 磁性柔性机器人在各种场景中展现出巨大的潜力,例如生物医学应用和工业任务,这得益于其形状可编程性和可重构性、安全交互性以及生物相容性。
尽管近期有所进展,但磁性柔性机器人仍受限于难以在实际操作现场(in situ)实时重新编程所需的磁化曲线,而这对于执行多种功能或完成不同任务来说至关重要。
2025 年 8 月 4 日,马克斯·普朗克智能系统研究所 Metin Sitti 团队在国际顶尖学术期刊 Nature 上发表了题为:Real-time in-situ magnetization reprogramming for soft robotics 的研究论文。东南大学仪器科学与工程学院包贤强、马克斯·普朗克智能系统研究所/苏黎世联邦理工学院 Fan Wang、浙江大学机械工程学院/良渚实验室张剑华为论文共同第一作者。
该研究开发了一种用于柔性机器人的实时原位磁化重编程方法,该方法使磁性软体机器人摆脱了对复杂外磁场的单一依赖,不仅实现了前所未有的变形模态多样性,还降低了对磁场生成系统复杂度的需求,为磁驱动技术的发展开辟了全新路径。
在这项最新研究中,研究团队开发了一种实时原位磁化重编程(real-time, in situ magnetization reprogramming)方法,该方法能够重新排列和重组磁单元,从而实现多样的磁化分布。
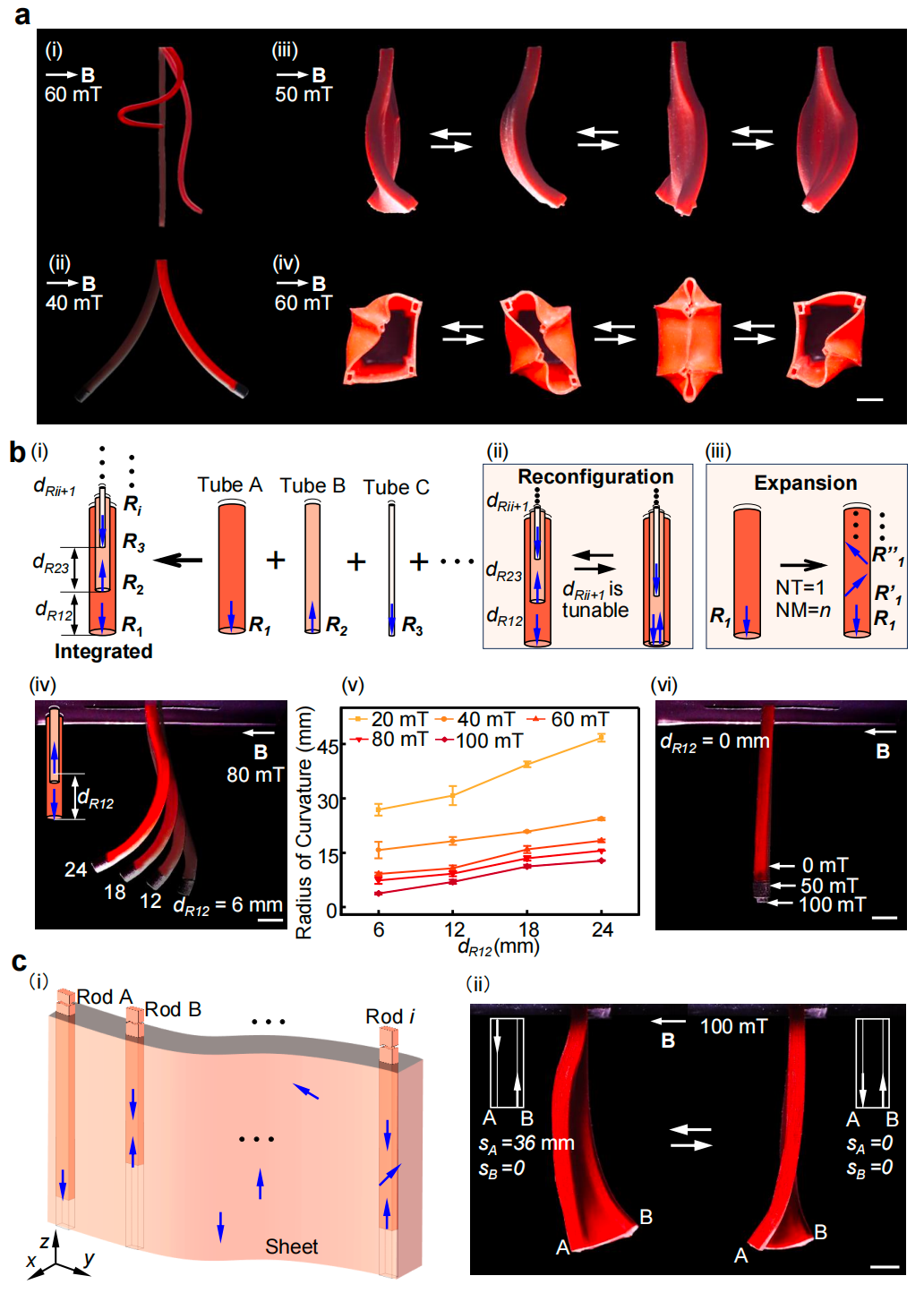
实时原位磁化重编程方法的图示
研究团队探讨了该方法在不同维度结构中的应用,从一维(1D)管到三维(3D)框架,展示了多样化且扩展的构型及其变形。这种方法在多种场景中也展现出灵活性,包括在不产生意外接触的情况下绕过物体、重新编程纤毛阵列、在相同磁场下协同或独立操控多个仪器,以及操控各种形状的物体。这些能力拓展了磁驱动技术的应用范围。
此外,这种方法使磁性柔性机器人摆脱了仅依靠外部磁场来改变形状的束缚,从而实现了前所未有的变形模式和种类,同时减少了对复杂磁场生成系统的需求;从而为磁驱动技术的发展开辟了新的途径。
https://www.nature.com/articles/s41586-025-09459-0
来源:生物世界,爱科会易仅用于学术交流,若相关内容侵权,请联系删除。