 国际站
国际站 2026年6月11日,Science 在线刊发了华中科技大学集成电路学院和航天航空学院张光祖、张耀、姜胜林、李康华联合团队研究成果“Mechanoelectrical metamaterials for broad-range, high-sensitivity pressure sensing”。
张光祖教授和张耀教授、宾夕法尼亚州立大学(PSU)王庆教授 为论文共同通讯作者,团队博士研究生杨非凡和杨浩铭为共同第一作者。
柔性压电触觉传感器具有能耗低、响应速度快、可承受较大变形、能适应人体曲线、易与复杂曲面共形贴附等优点,在人形机器人、具身智能体、柔性可穿戴电子设备等领域具有广阔的应用前景。与人体刚度相匹配的压电软材料,是制备具有类人触觉感知能力的柔性压电传感器的理想材料。然而,材料压电性能与柔软易变形性之间存在相容性问题,压电材料的压电性来源于其非对称晶体结构,而晶体结构会导致高刚度和高脆性。例如,压电晶体、压电陶瓷等传统压电材料刚度大,断裂应变较小,难以直接应用于柔性压电传感器;以聚偏氟乙烯(PVDF)及其共聚物为代表的铁电聚合物虽然是柔性传感器的典型压电材料,但其杨氏模量仍远高于人体皮肤,而且矫顽场高、极化难度大。此外,压力传感器的高灵敏度与宽量程之间存在内在矛盾:高灵敏度与杨氏模量负相关,而宽量程与承载能力正相关,承载能力又与杨氏模量正相关。
 图1. 双梯度压电超材料实现高灵敏和宽量程压力传感
图1. 双梯度压电超材料实现高灵敏和宽量程压力传感
针对上述问题,团队发展了一种由聚合物基体与分子铁电体复合而成的新型压电软材料,使其具有可光固化3D打印和可大范围调控刚度的双重特征,在此基础上提出了杆板复合双梯度(结构梯度和材料刚度梯度)超结构设计方法,突破了压力传感器件高灵敏度与宽量程难以共存的瓶颈。要克服高灵敏度与宽量程的冲突,需要在传感结构中实现低模量和高承载能力的共存,并保证应力-应变(电信号)曲线单调变化。团队提出了一种变形模式能自适应切换的新型杆板混杂拓扑结构,其主要变形模式在小载荷作用下为杆的弯曲变形,随着载荷增大能自适应切换为板的压缩变形,从而实现了结构刚度和承载能力的解耦。通过对胞元结构的力学设计,柔性压电超材料能够在预设的变形路径内主动适应不同载荷并切换变形模式,实现了高灵敏度与宽量程的共存,材料刚度梯度的引入进一步将其灵敏度提高到319.5 mV/kPa,同时将探测范围进一步扩大到1.3 Pa至3.45 MPa。
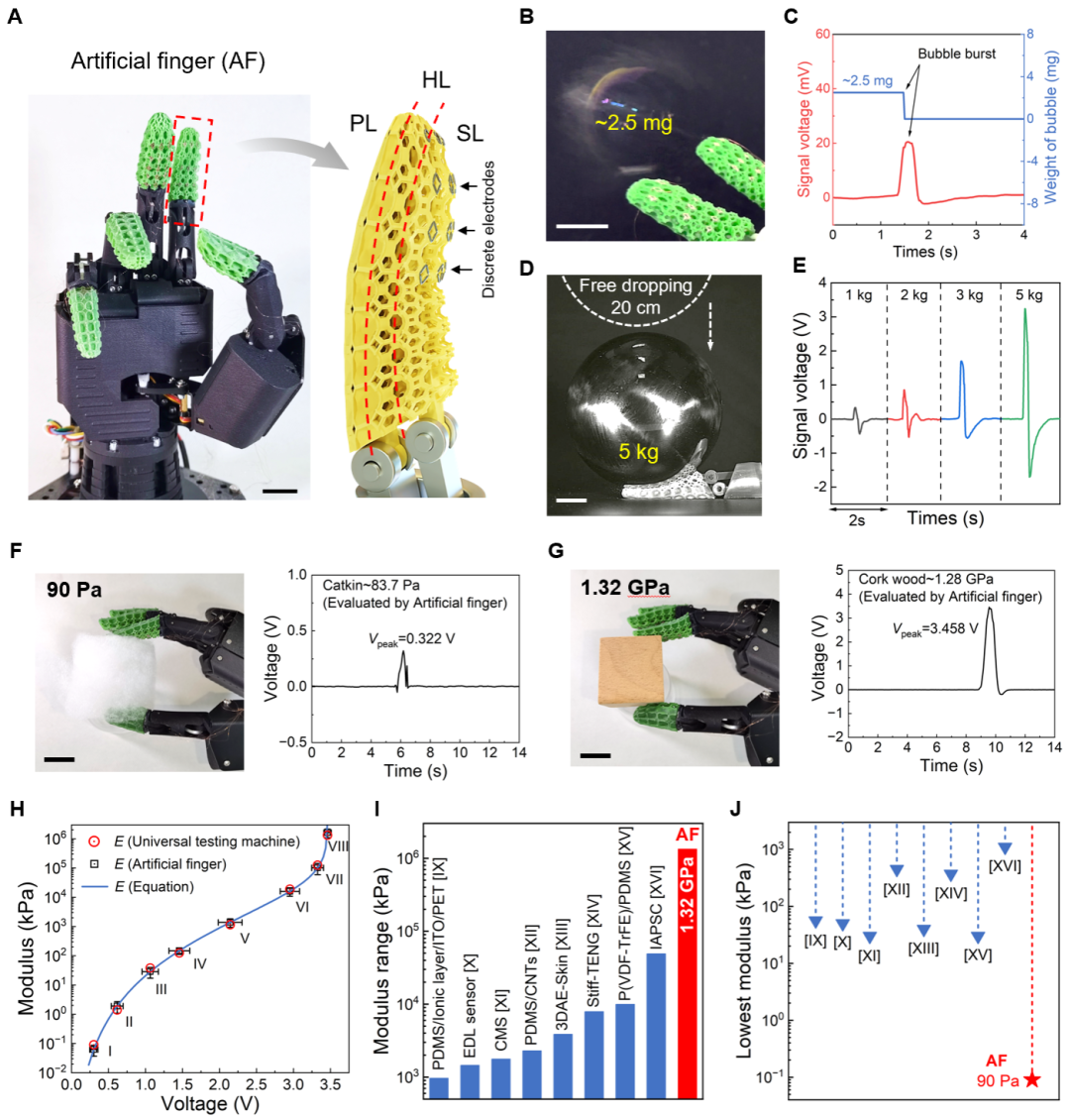
图2. 压电超材料用于智能机器手指,实现压力感知与模量识别
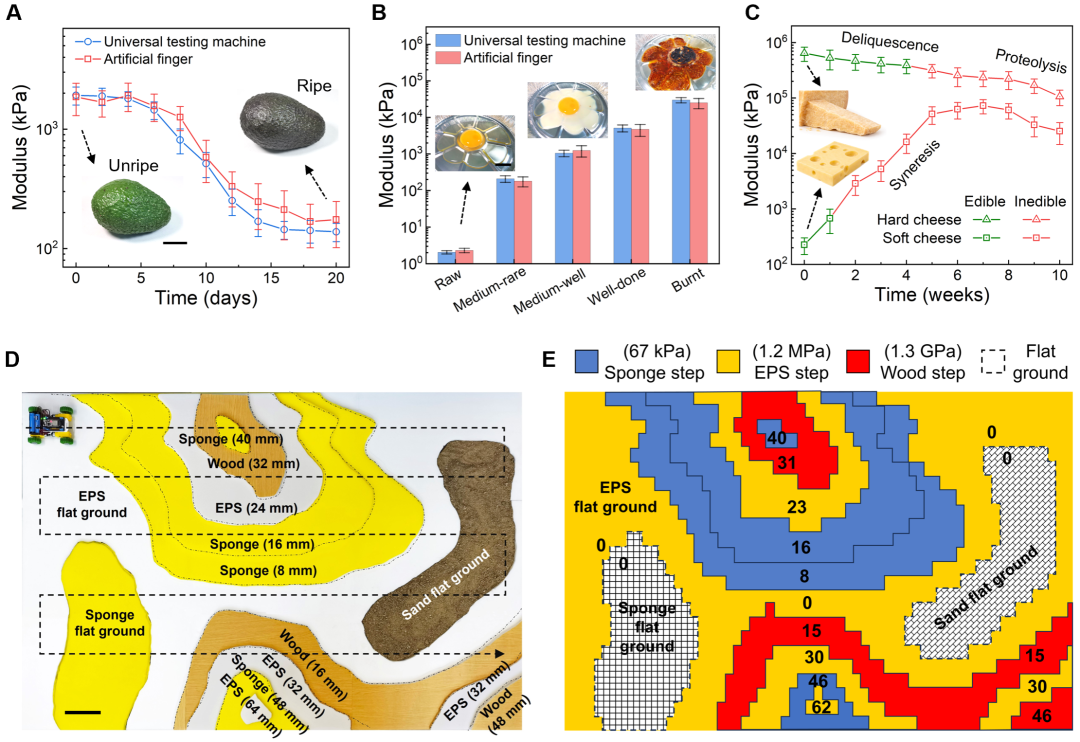
图3. 压电超材料用于食品新鲜度检测与地形地貌感知
将柔性压电超材料进行共形设计可打印机器手的手指,实现了传感器的材料—结构—功能一体化设计。该人工手指兼具高灵敏度和高承载能力所带来的宽检测范围,能追踪瓢虫(约20毫克)的实时爬行轨迹,也能检测肥皂泡(约2.5毫克)的着陆与破裂,还能够承受大载荷,例如在承受5公斤钢球从20厘米高度落下的冲击时,人工手指仍能保持结构完整,而人类手指在相同冲击下会遭受皮肤损伤甚至骨折。同时手指在触摸柳絮、海绵、橡皮泥、木块等不同物体时,能够测定触摸物体的杨氏模量,模量识别范围从90 Pa到1.32 GPa,跨越7个数量级。基于模量识别,手指还可用于评估水果、奶酪、不同烹饪阶段的鸡蛋等食物的新鲜度和成熟度等特征。此外,将压电超材料制成车轮并装配于电动小车后,这种车轮能用于地形感知和地层模量检测,展示了其在人类难以进入的环境中进行传感探测的潜力。
合作者还包括武汉科技大学/武汉理工大学董丽杰教授、华中科技大学吴甲民教授,上海交通大学陈昕教授, 以及宾夕法尼亚州立大学张宿林教授等。
原文链接
https://www.science.org/doi/10.1126/science.aeb3456
来源:华中科技大学,爱科会易仅用于学术交流,若相关内容侵权,请联系删除。